相关的指令盒
- Move To:让机器人移动到指定位置
- Move Toward:让机器人朝指定方向移动
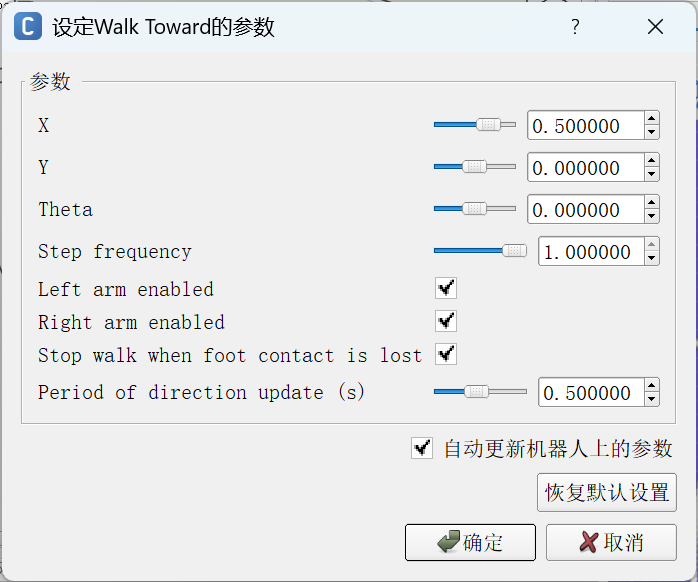
- Walk Toward:让机器人走到指定位置
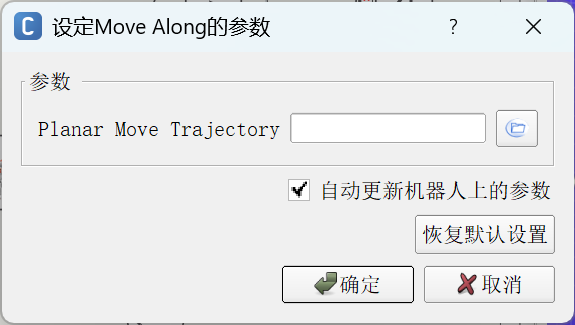
- Move Along:让机器人沿着指定路径移动
Move To 指令盒
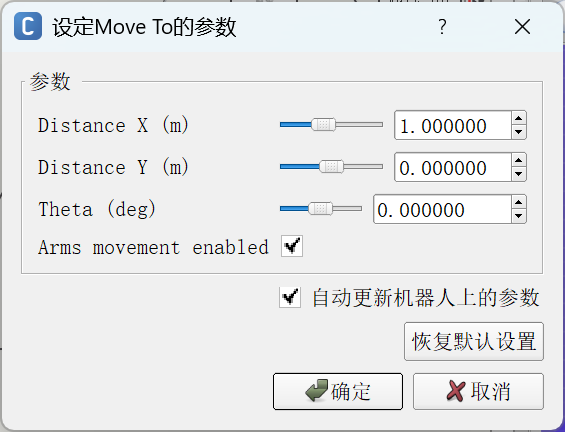
- Destination X (m):目标位置的 X 坐标,单位为米
- Destination Y (m):目标位置的 Y 坐标,单位为米
- Theta (deg):目标位置的角度,单位为弧度
- Arms movement enabled:是否启用手臂运动,默认启用
私以为,你想要让机器人转弯,理论上,可以使
Destination X为0.900000,Destination Y为0.000000,Theta为90度(即1.5708弧度)。
Move Toward 指令盒
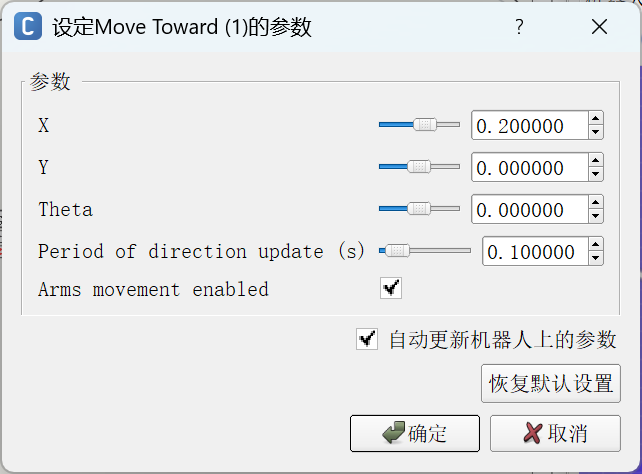
- X (m/s):机器人在 X 方向上的速度,单位为米每秒
- Y (m/s):机器人在 Y 方向上的速度,单位为米每秒
- Theta (rad/s):机器人旋转的角速度,单位为弧度每秒
- Period of direction update (s):方向更新周期,单位为秒
- Arms movement enabled:是否启用手臂运动,默认启用
Walk Toward 指令盒
Move Along 指令盒